
Necessità applicativa: riconoscere il manico di caffettiera in modo affidabile, fornendo le coordinate X,Y e angolo al robot.
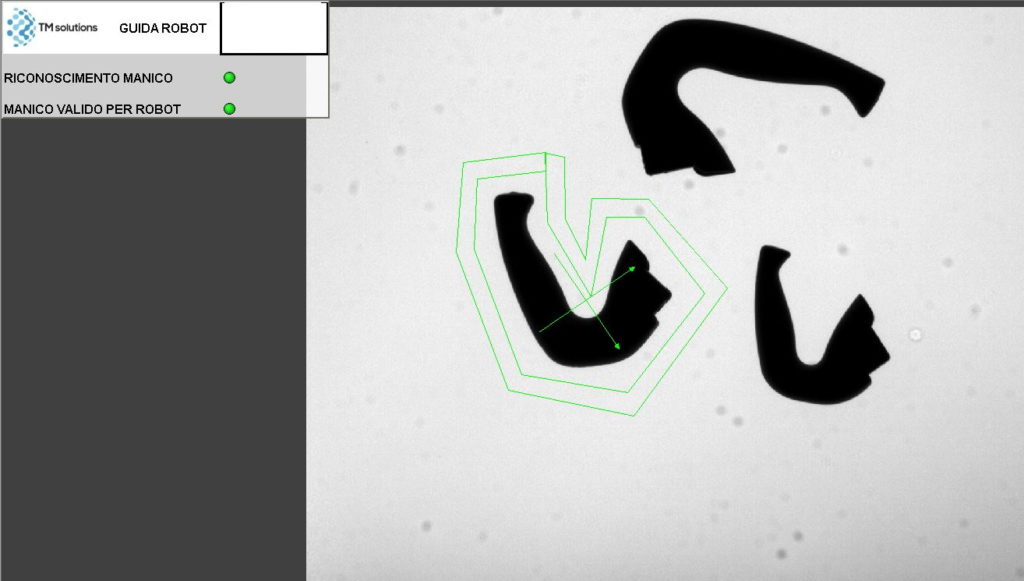
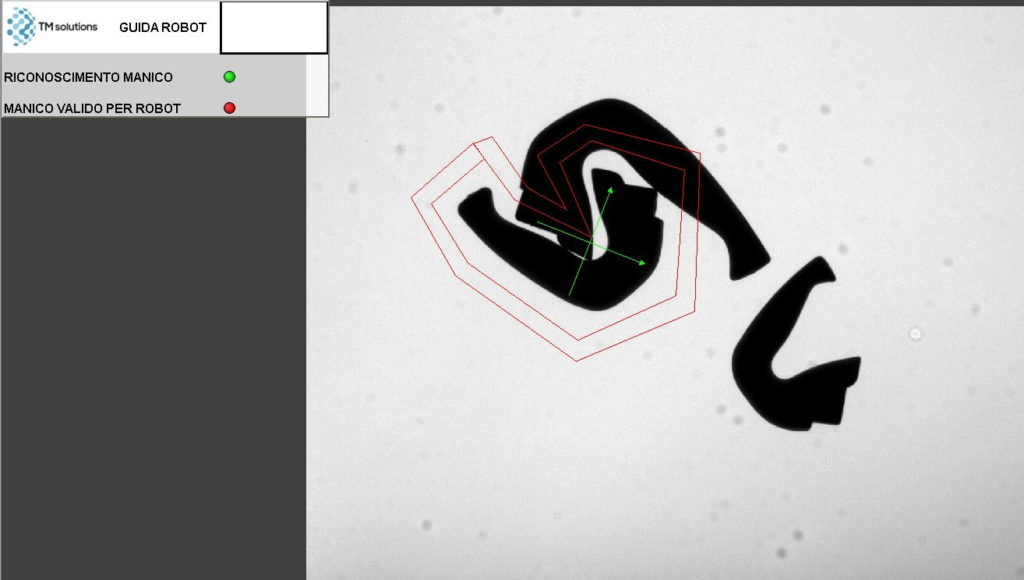
Il sistema di visione, oltre a riconoscere i manici e le relative informazioni di posizione, è anche in grado di segnalare e identificare i manici liberi da ingombri per poter essere manipolati, grazie all’utilizzo di opportune aree di controllo posizionate sul profilo del manico.
Utilizzando la tecnica di retro illuminazione, si riesce ad evidenziare la forma dell’oggetto senza generare riflessi sull’oggetto stesso, enfatizzandone il contrasto con lo sfondo retroilluminato.
Manico manipolabile
Manico non manipolabile
GUARDA ANCHE: